Jak działają silniki serwo?


Jak działa serwomotor? Silnik serwo to urządzenie elektromechaniczne, które wytwarza moment obrotowy i prędkość na podstawie dostarczanego prądu i napięcia. Serwomotor działa jako część systemu pętli zamkniętej, zapewniając moment obrotowy i prędkość zgodnie z poleceniami sterownika serwo, wykorzystującego urządzenie sprzężenia zwrotnego do zamknięcia pętli. Urządzenie sprzężenia zwrotnego dostarcza informacje takie jak prąd, prędkość lub położenie do serwomechanizmu, który dostosowuje działania silnika w zależności od zadanych parametrów.
Silniki serwo są dostępne w szerokiej gamie typów, kształtów i rozmiarów. Termin serwo został po raz pierwszy użyty w 1859 roku przez Josepha Facorta, który zaimplementował mechanizm sprzężenia zwrotnego, aby pomóc w sterowaniu statkiem za pomocą pary, celem kontrolowania sterów. Serwomotor jest częścią serwomechanizmu składającego się z trzech kluczowych elementów – silnika, urządzenia sprzężenia zwrotnego i elektroniki sterującej. Silnik może być AC lub DC, szczotkowy lub bezszczotkowy, obrotowy lub liniowy i dowolnej wielkości. Urządzeniem sprzężenia zwrotnego może być potencjometr, czujnik Halla, obrotomierz, enkoder, resolver, przetwornik liniowy lub dowolny inny czujnik. Uzupełnieniem systemu serwo jest elektronika sterująca, która zasila silnik i porównuje dane sprzężenia zwrotnego do parametrów referencyjnych, sprawdzając czy silnik serwo działa prawidłowo. Istnieje wiele rodzajów zastosowań serwosilników, od prostych silników prądu stałego stosowanych w zastosowaniach hobbystycznych (np. modele samolotów) po zaawansowane silniki bezszczotkowe, napędzane przez złożone kontrolery ruchu, stosowane w wieloosiowych centrach obróbkowych. Jednym z przykładów popularnego serwomechanizmu jest tempomat pojazdu, który składa się z silnika, czujnika prędkości (sprzężenie zwrotne) i elektroniki do porównywania prędkości pojazdu z ustawioną prędkością. Jeśli pojazd zwalnia, czujnik przekazuje te dane do elektroniki, która z kolei zwiększa dopływ gazu do silnika, aby zwiększyć prędkość do pożądanej wartości zadanej – prosty system zamkniętej pętli.
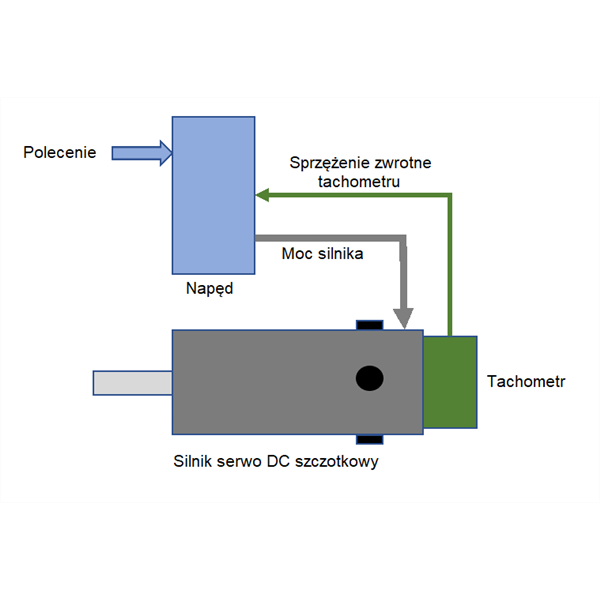
Prosty przemysłowy serwosilnik składa się z silnika prądu stałego z magnesami trwałymi ze zintegrowanym obrotomierzem, który zapewnia napięcie wyjściowe proporcjonalne do prędkości. Elektronika napędu dostarcza niezbędne napięcie i prąd do silnika w oparciu o napięcie z obrotomierza. W tym przykładzie zadana prędkość (reprezentowana jako napięcie odniesienia) jest ustawiana w sterowniku, a następnie obwód w sterowniku porównuje napięcie sprzężenia zwrotnego i określa, czy pożądana prędkość została osiągnięta – zwana zamkniętą pętlą prędkości. Pętla prędkości monitoruje zadaną prędkość i sprzężenie zwrotne z obrotomierza, podczas gdy sterownik dostosowuje moc silnika, aby utrzymać żądaną zadaną prędkość.
W bardziej wyrafinowanym systemie serwomotorów wiele wbudowanych pętli jest dostrojonych pod kątem optymalnej wydajności i precyzyjnej kontroli ruchu. System składa się z pętli prądu, prędkości i położenia, które wykorzystują precyzyjne elementy sprzężenia zwrotnego. Każda pętla sygnalizuje kolejną pętle i monitoruje odpowiednie elementy sprzężenia zwrotnego, aby dokonać korekt w czasie rzeczywistym, aby dopasować zadane parametry.
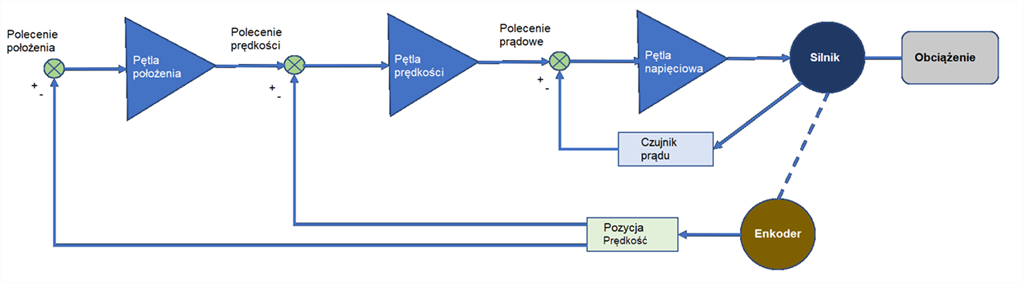
Pętla podstawowa to pętla prądowa lub momentowa. Prąd jest proporcjonalny do momentu obrotowego w silniku obrotowym (lub siły w silniku liniowym), który zapewnia przyspieszenie lub ciąg. Czujnik prądu to urządzenie, które dostarcza sprzężenia zwrotnego związanego z prądem przepływającym przez silnik. Czujnik wysyła sygnał z powrotem do elektroniki sterującej – zwykle sygnał analogowy lub cyfrowy proporcjonalny do prądu silnika. Ten sygnał jest odejmowany od sygnału komendy. Gdy silnik serwo osiągnie zadany prąd, pętla będzie spełniona, dopóki prąd nie spadnie poniżej zadanego. Pętla będzie następnie zwiększać prąd aż do osiągnięcia zadanego prądu, przy czym cykl będzie kontynuowany z częstotliwością aktualizacji poniżej sekundy.
Pętla prędkości działa w ten sam sposób z napięciem proporcjonalnym do prędkości. Pętla prędkości wysyła do pętli prądowej polecenie zwiększenia prądu (a tym samym zwiększenia napięcia), gdy prędkość spadnie poniżej zadanej prędkości.
Pętla pozycyjna akceptuje polecenie dla PLC lub kontrolera ruchu, które z kolei dostarcza polecenie prędkości, które jest podawane do pętli prędkości, która z kolei steruje wymaganym prądem do przyspieszenia, utrzymywania i zwalniania silnika w celu przemieszczenia się do zadanej pozycji. Wszystkie trzy pętle pracują w zoptymalizowanej synchronizacji, aby zapewnić płynną i precyzyjną kontrolę mechanizmu serwo.